precyzyjna przekładnia robota

Rozmiary: RV-25N RV-42N RV-60N RV-80N RV-100N RV-125N RV-160N RV-380N RV-500N RV-700N
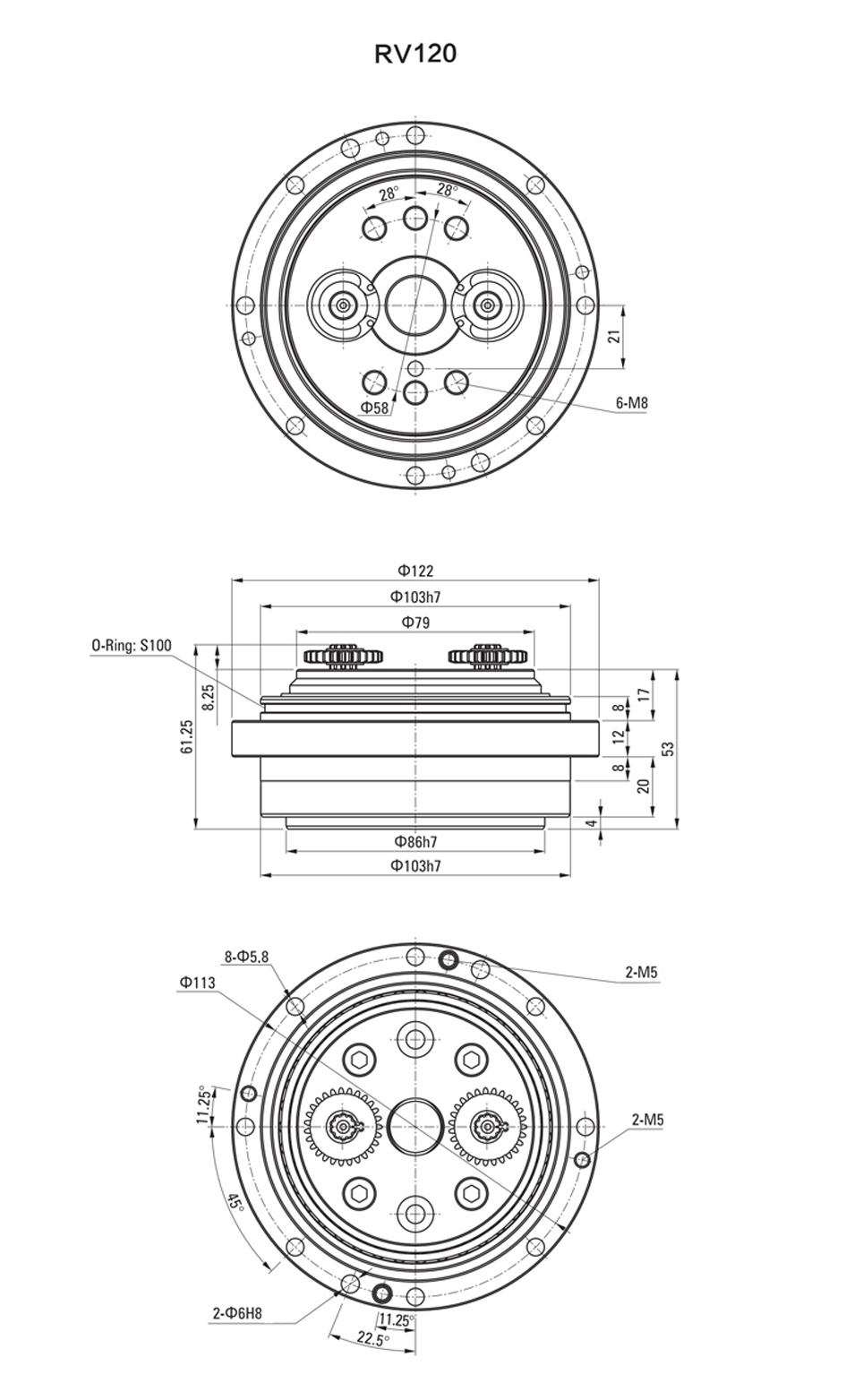
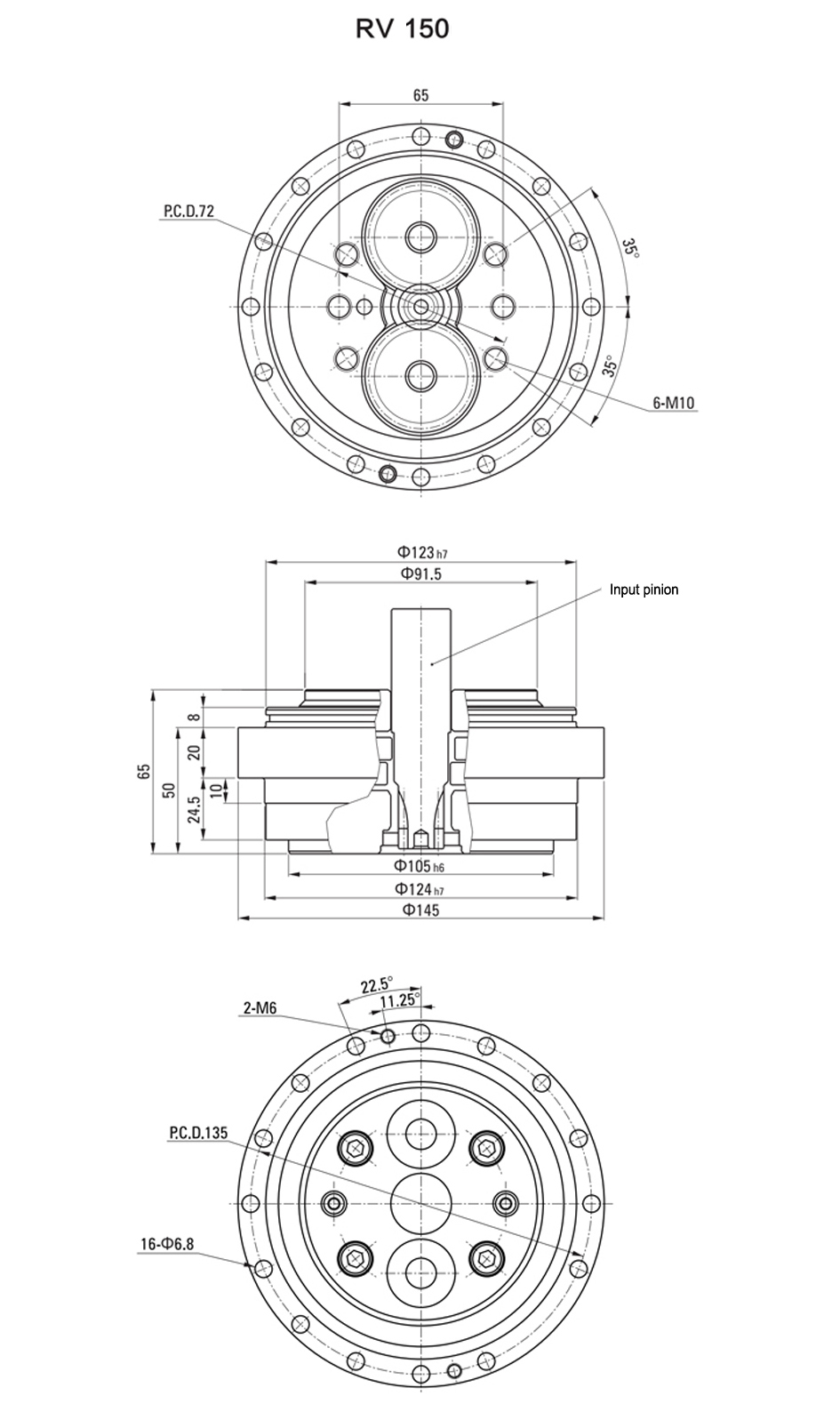
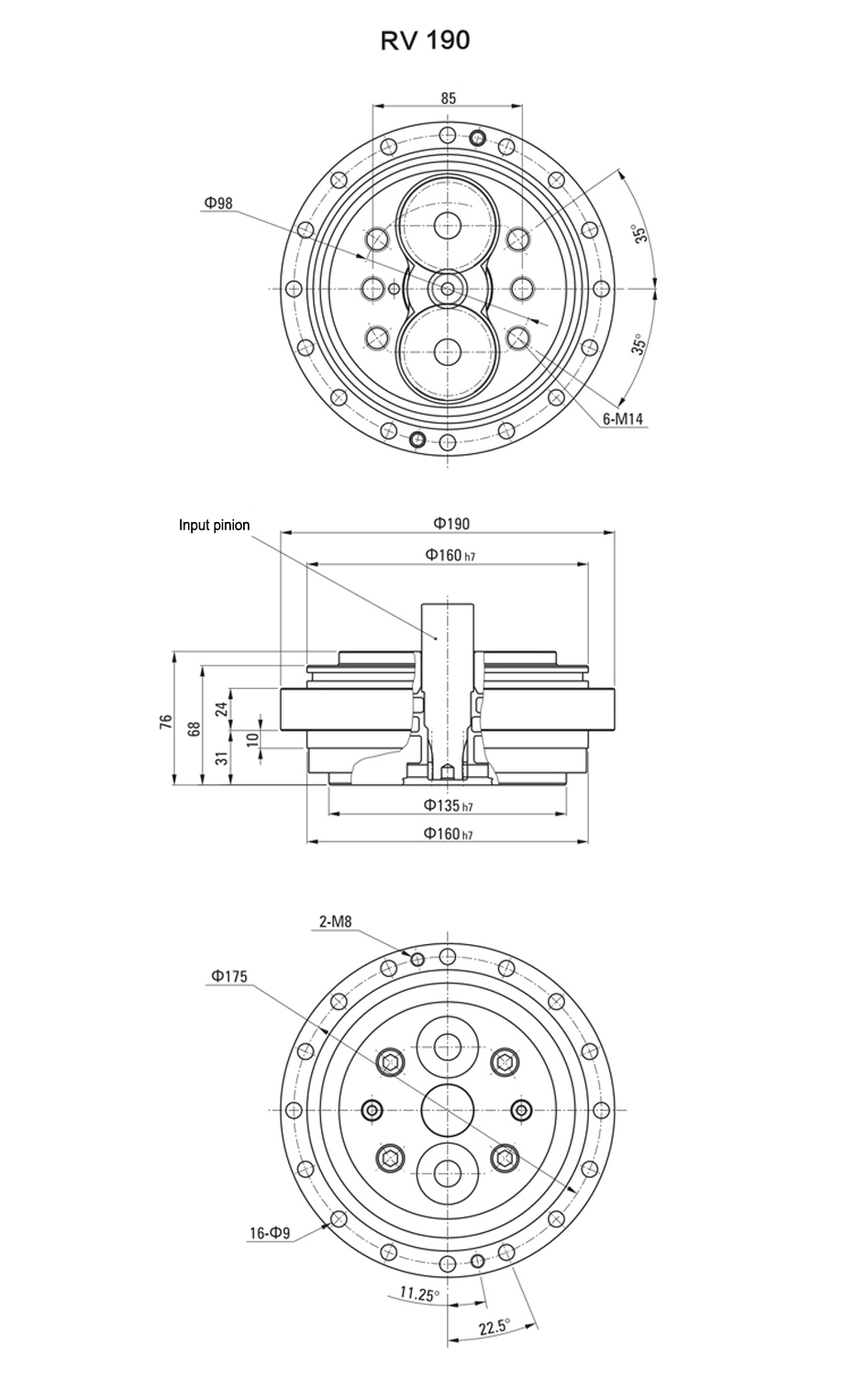
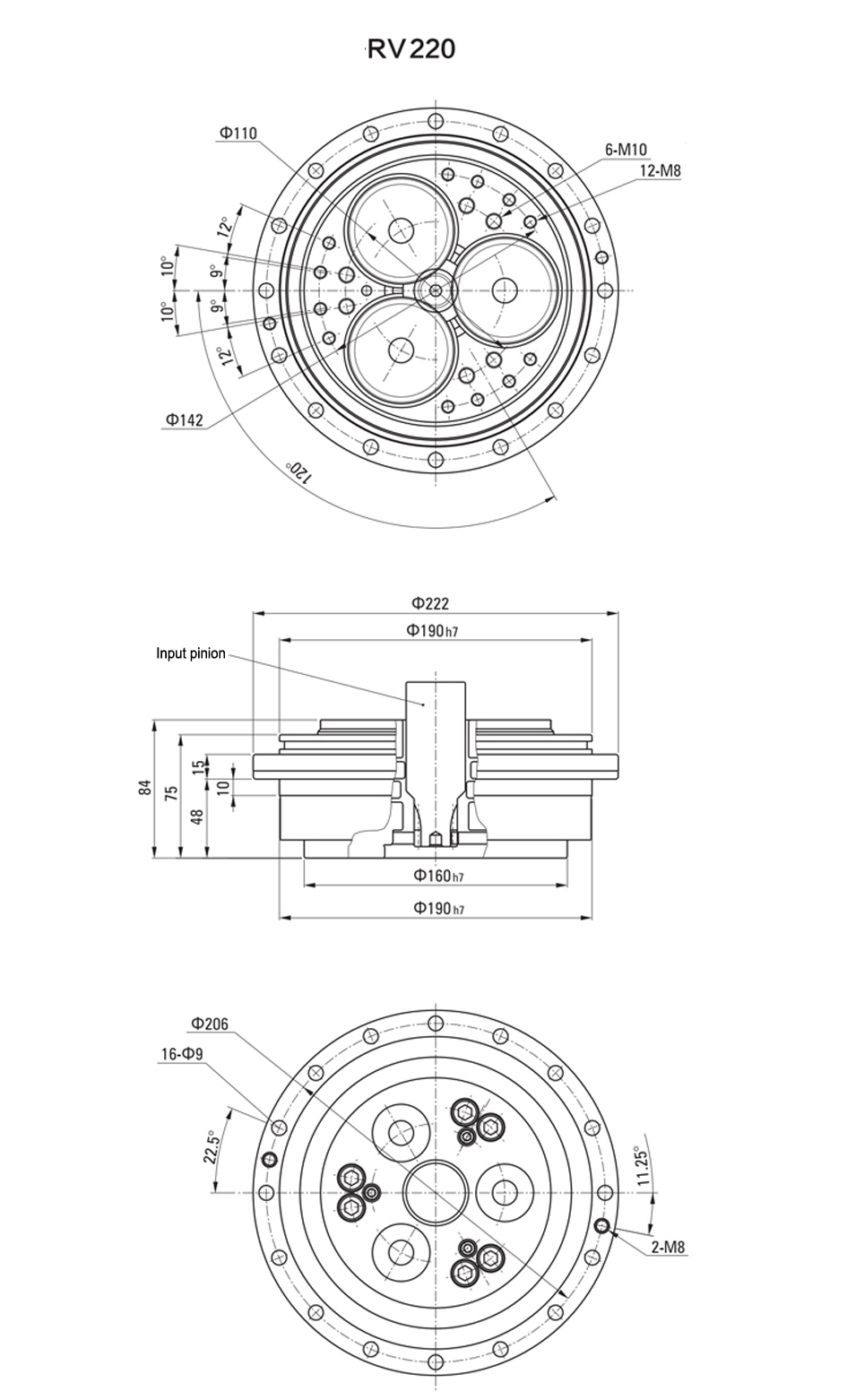
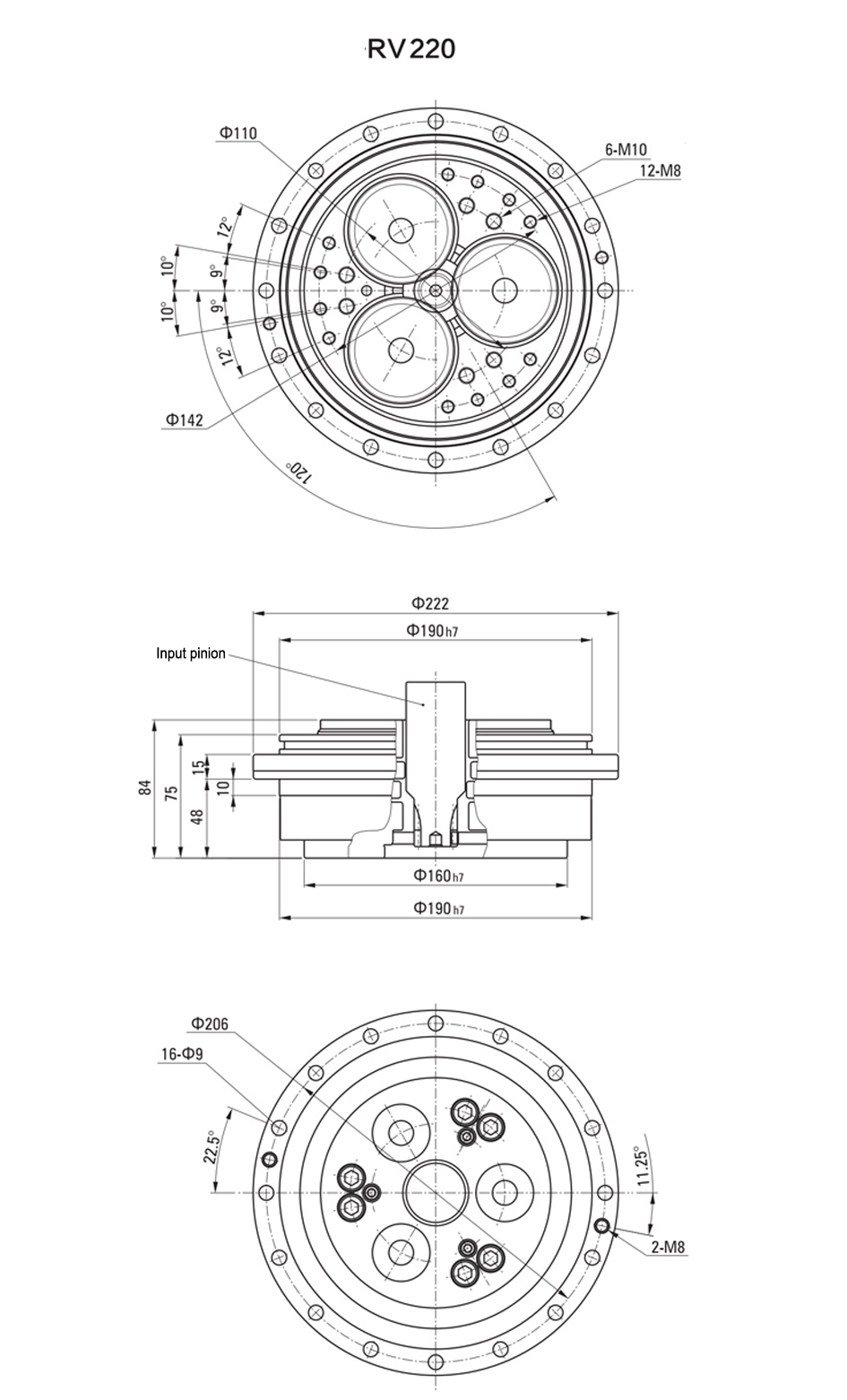
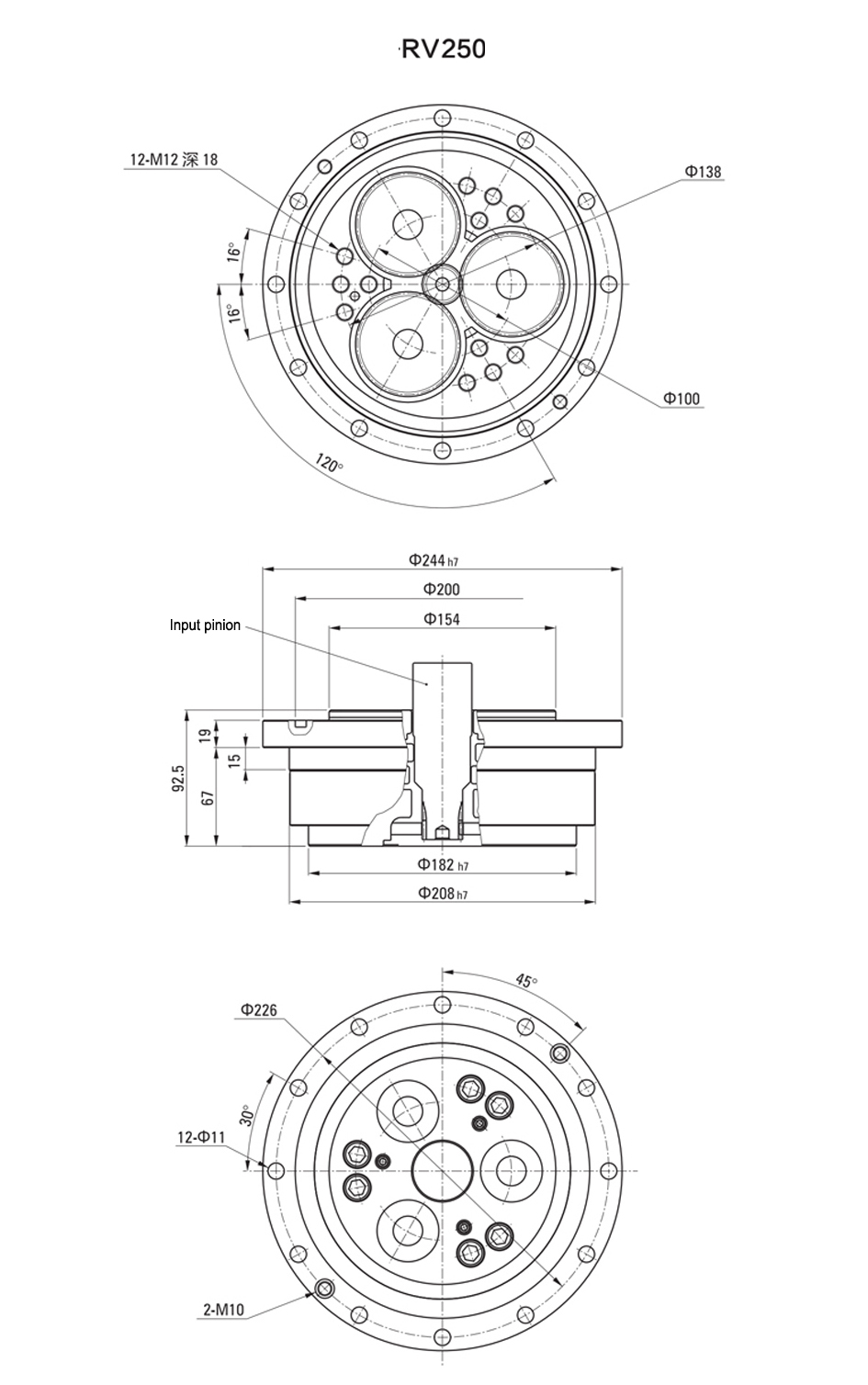
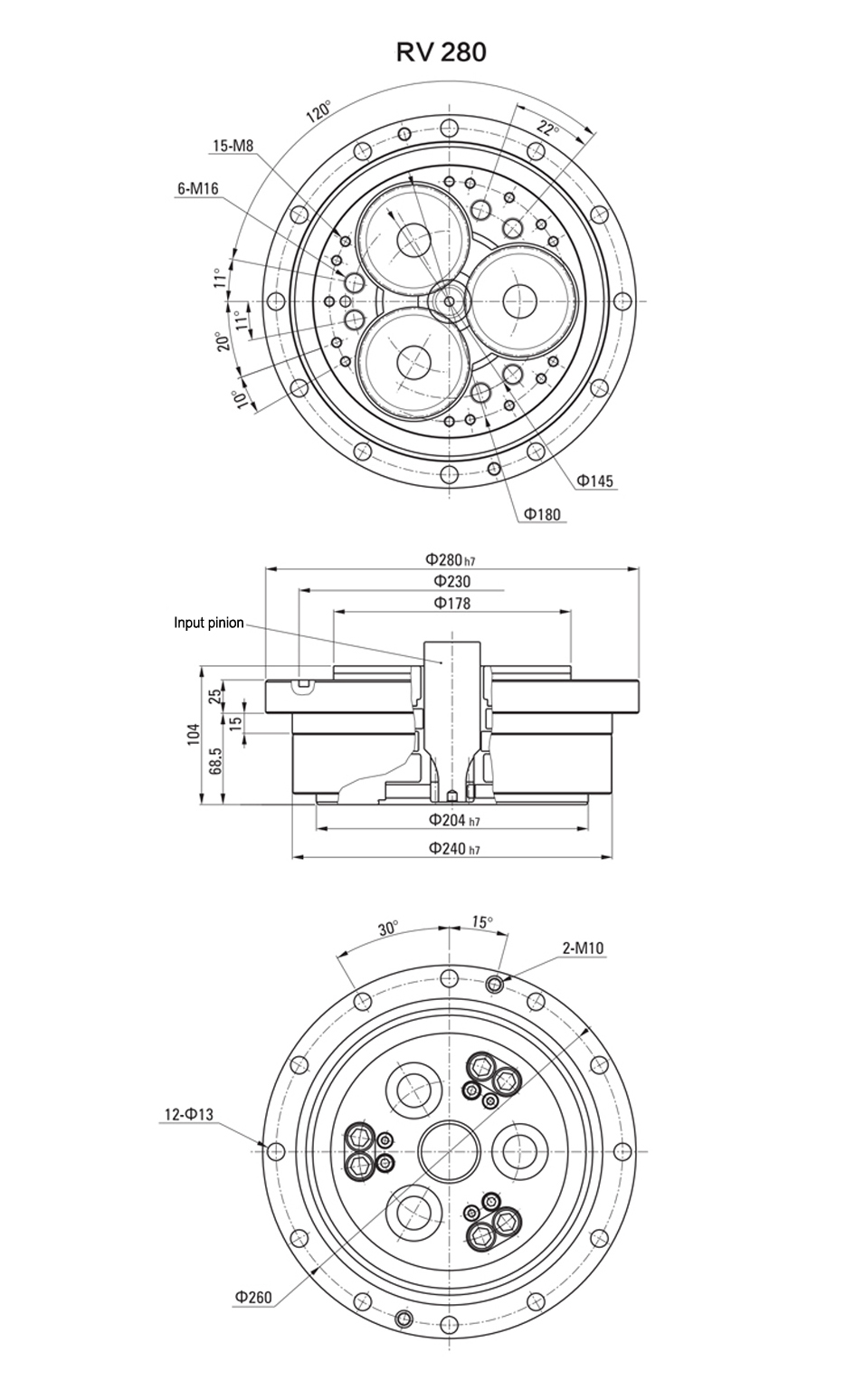
RV120 RV150 RV190 RV220 RV250 RV280
RVE120 RVE150 RVE190 RVE220 RVE250 RVE280
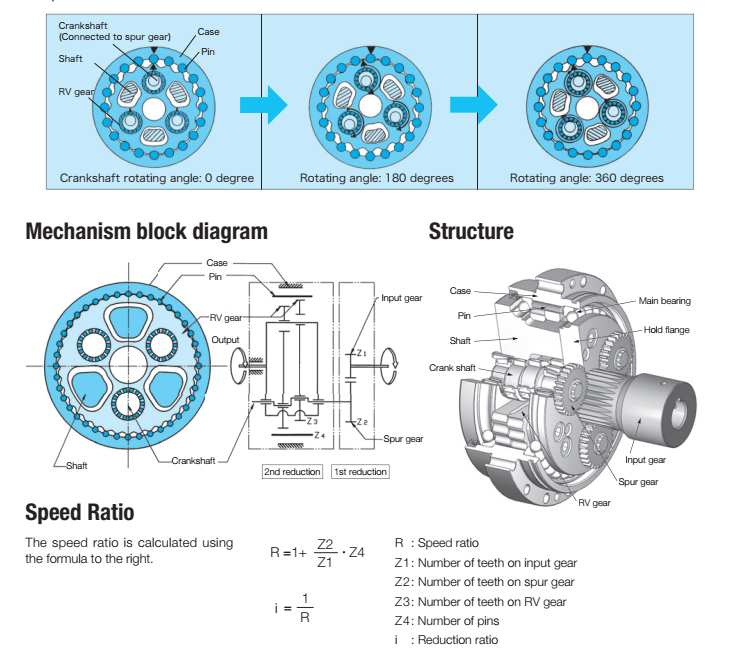
• 1-szy stopień redukcji przekładni czołowej
Koło zębate wejściowe sprzęga się i obraca koła zębate czołowe, które są sprzężone z wałami korbowymi. Kilka ogólnych przełożeń można uzyskać, wybierając różne przełożenia pierwszego stopnia.
2-gi stopień przekładni planetarnej redukcji
• Wały korbowe napędzane przez koła zębate czołowe powodują ruch mimośrodowy dwóch kół zębatych planetarnych zwanych kołami zębatymi RV, które są przesunięte względem siebie o 180 stopni, aby zapewnić zrównoważone obciążenie.
• Ruch mimośrodowy kół zębatych RV powoduje sprzężenie zębów kół zębatych o kształcie cykloidalnym z cylindrycznymi kołkami umieszczonymi wokół wewnętrznej krawędzi obudowy.
• W trakcie jednego obrotu wałów korbowych zęby przekładni RV przesuwają się o odległość jednego sworznia w kierunku przeciwnym do obracających się korb. Ruch przekładni RV jest taki, że zęby pozostają w bliskim kontakcie z kołkami, a wiele zębów dzieli obciążenie jednocześnie.
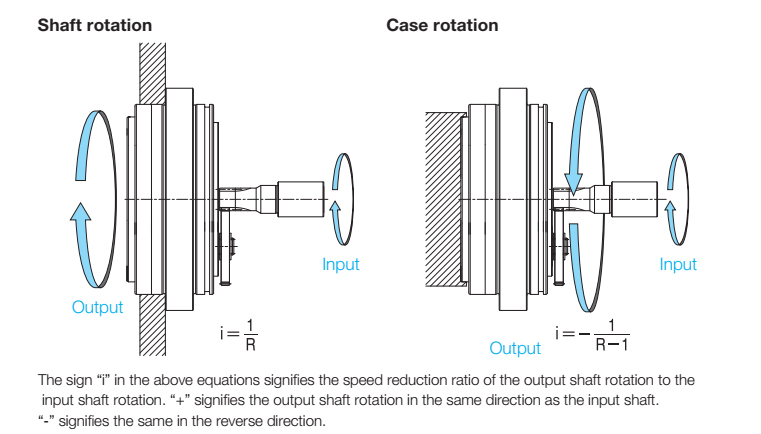
• Wyjściem może być wał lub obudowa. Jeśli sprawa jest naprawiona, wał jest wyjściem. Jeśli wał jest zamocowany, sprawa jest wyjściem.
Wszystkie koła zębate są nawęglane z dużym obciążeniem, niskim poziomem hałasu, niskimi wibracjami, niską bezwładnością i długą żywotnością, wysoką precyzją dla małych odchyleń w kierunku obrotowym. Niski koszt dla wszystkich zastosowań.
Kierunek obrotów i przełożenie
Racja: 41 81 102,17 102,81 107,66 125,21 126 137 156 164,07 141 145,61 161 201 171 75 93 117 139 162 185 81 105 123 144 159 192,75 105 118 142,44 159 183 203,52
Kod produktu
Całkowity stosunek prędkości i (pierwszego i drugiego stopnia redukcji) będzie się różnić między obrotem wału a obrotem obudowy i można go obliczyć na podstawie stosunku prędkości.